Rotary encoder

เครื่องเข้ารหัสแบบโรตารี่ หรือ ที่เรียกว่าเครื่องเข้ารหัสเพลา เป็นอุปกรณ์เครื่องกลไฟฟ้าที่แปลงตำแหน่งเชิงมุม หรือ การเคลื่อนที่ของเพลา หรือ เพลาเป็นสัญญาณอนาล็อก หรือ ดิจิตอล
ตัวเข้ารหัสแบบหมุนมีสองประเภทหลัก
Absolute (แบบสัมบูรณ์) และ Incremental (แบบเพิ่มหน่วย)
เอาต์พุตของ Absolute Encoder จะระบุตำแหน่งเพลาปัจจุบัน ทำให้เป็นตัวแปลงสัญญาณมุม
เอาต์พุตของ Incremental Encoder จะให้ข้อมูลเกี่ยวกับการเคลื่อนที่ของเพลา
ซึ่งโดยทั่วไปแล้วจะประมวลผลในส่วนอื่นเป็นข้อมูล เช่น ตำแหน่ง ความเร็ว และระยะทาง
เครื่องเข้ารหัสแบบโรตารี่ถูกนำมาใช้ในการใช้งานที่หลากหลายซึ่งต้องมีการตรวจสอบ หรือควบคุม
หรือ ทั้งสองอย่าง ของระบบกลไก รวมถึงการควบคุมทางอุตสาหกรรม หุ่นยนต์ เลนส์ถ่ายภาพ
อุปกรณ์ป้อนข้อมูลของคอมพิวเตอร์ เช่น เมาส์ออปโตเมคานิคัล และ แทร็กบอล
Technology สำหรับ Rotary Encoder
Mechanical : หรือที่เรียกว่าเครื่องเข้ารหัสที่เป็นสื่อกระแสไฟฟ้า ชุดรางทองแดงเส้นรอบวงที่สลักไว้บน PCB ใช้เพื่อเข้ารหัสข้อมูลผ่านแปรงสัมผัสที่ตรวจจับบริเวณที่เป็นสื่อกระแสไฟฟ้า เครื่องเข้ารหัสเชิงกลนั้นประหยัดแต่อ่อนไหวต่อการสึกหรอทางกล สิ่งเหล่านี้พบได้ทั่วไปในอินเทอร์เฟซของมนุษย์ เช่น มัลติมิเตอร์แบบดิจิตอล[3]
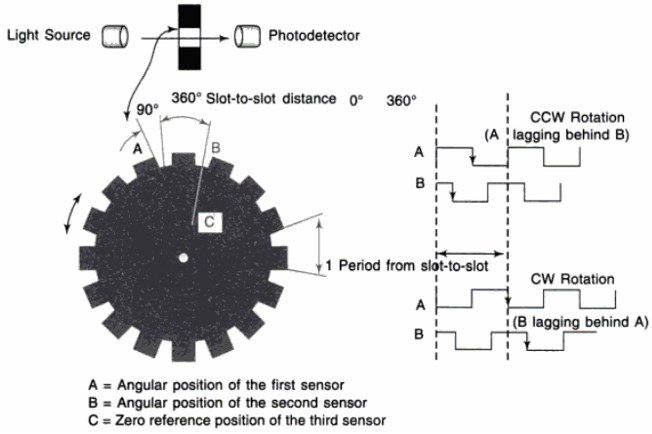
Optical: ใช้แสงส่องลงบนโฟโตไดโอดผ่านรอยผ่าในแผ่นโลหะหรือแก้ว รุ่นสะท้อนแสงยังมีอยู่ นี่เป็นหนึ่งในเทคโนโลยีที่พบบ่อยที่สุด Encoderแบบออปติคัลมีความไวต่อฝุ่นมาก
On-Axis Magnetic: เทคโนโลยีนี้มักใช้แม่เหล็กนีโอไดเมียม 2 ขั้วแบบแม่เหล็กแบบพิเศษติดกับเพลามอเตอร์ เนื่องจากสามารถยึดกับปลายเพลาได้ จึงทำงานร่วมกับมอเตอร์ที่มีแกนยื่นออกมาจากตัวมอเตอร์ได้เพียง 1 เพลาเท่านั้น ความแม่นยำอาจแตกต่างกันตั้งแต่สองสามองศาจนถึงต่ำกว่า 1 องศา ความละเอียดได้ต่ำสุด 1 องศาหรือสูงถึง 0.09 องศา (4000 CPR, Count per Revolution)[4] การประมาณค่าภายในที่ออกแบบมาไม่ดีอาจทำให้เอาต์พุตกระวนกระวายใจ แต่สิ่งนี้สามารถเอาชนะได้ด้วยการเฉลี่ยตัวอย่างภายใน
Off-Axis Magnetic: เทคโนโลยีนี้มักใช้แม่เหล็กเฟอร์ไรต์ที่เชื่อมด้วยยางซึ่งติดอยู่กับดุมโลหะ ให้ความยืดหยุ่นในการออกแบบและต้นทุนต่ำสำหรับการใช้งานที่กำหนดเอง เนื่องจากชิปเข้ารหัสนอกแกนที่มีความยืดหยุ่นจำนวนมาก จึงสามารถตั้งโปรแกรมให้ยอมรับความกว้างของขั้วจำนวนเท่าใดก็ได้ จึงสามารถวางชิปในตำแหน่งใดก็ได้ที่จำเป็นสำหรับการใช้งาน Encoderแม่เหล็กทำงานในสภาพแวดล้อมที่รุนแรงซึ่งEncoderแบบออปติคัลจะไม่ทำงาน
Basic types Of Encoder
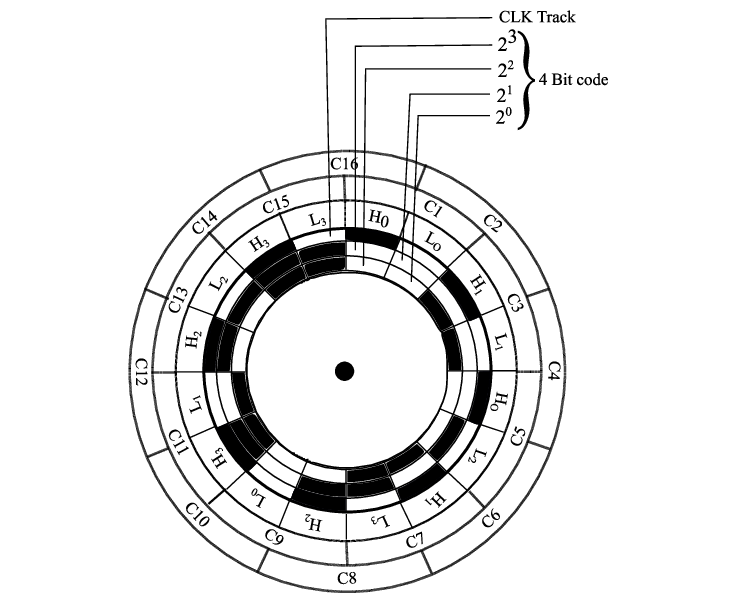
 Absolute (แบบสัมบูรณ์)
Absolute (แบบสัมบูรณ์)
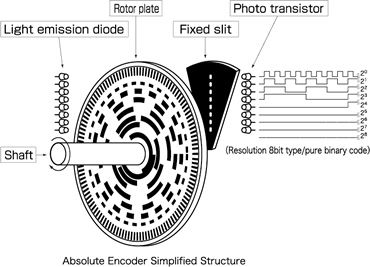
Encoderแบบสัมบูรณ์รักษาข้อมูลตำแหน่งเมื่อมีการหยุดจ่ายพลังงานให้กับตัว Encoder ตำแหน่งของEncoderจะพร้อมใช้งานทันทีเมื่อใช้พลังงาน ความสัมพันธ์ระหว่างค่าEncoderและตำแหน่งทางกายภาพของเครื่องจักรควบคุมถูกกำหนดไว้ที่การประกอบ ระบบไม่จำเป็นต้องกลับไปที่จุดสอบเทียบเพื่อรักษาความถูกต้องของตำแหน่ง Encoderแบบสัมบูรณ์มีวงแหวนรหัสหลายวงพร้อมการถ่วงน้ำหนักแบบไบนารีที่หลากหลายซึ่งให้ข้อมูลคำที่แสดงตำแหน่งที่แน่นอนของEncoderภายในการปฏิวัติครั้งเดียว Encoderประเภทนี้มักถูกเรียกว่าEncoderสัมบูรณ์แบบขนาน เครื่องเข้ารหัสแบบหมุนสัมบูรณ์แบบหมุนได้หลายรอบประกอบด้วยรหัสล้อเพิ่มเติมและล้อแบบฟันเฟือง ล้อที่มีความละเอียดสูงจะวัดการหมุนแบบเศษส่วน และล้อรหัสที่มีความละเอียดต่ำกว่าจะบันทึกจำนวนรอบการหมุนทั้งหมดของเพลา
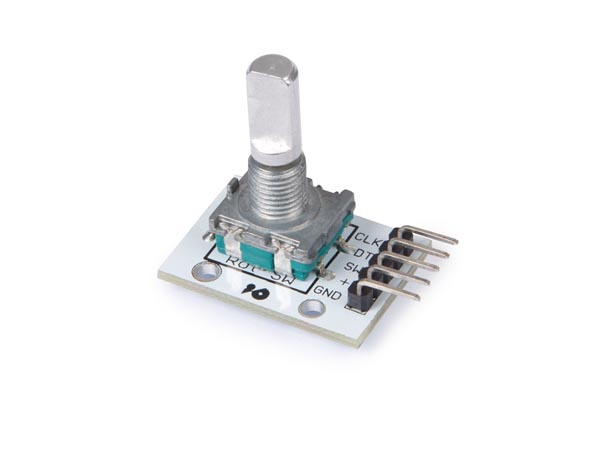
Incremental (แบบเพิ่มหน่วย)
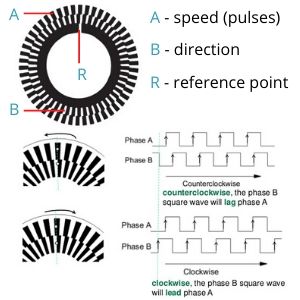
Encoderที่เพิ่มขึ้น Encoderแบบเพิ่มหน่วยจะรายงานการเปลี่ยนแปลงในตำแหน่งทันที ซึ่งเป็นความสามารถที่จำเป็นในบางแอปพลิเคชัน อย่างไรก็ตาม จะไม่รายงานหรือติดตามตำแหน่งที่แน่นอน ด้วยเหตุนี้ ระบบกลไกที่ตรวจสอบโดยEncoderแบบเพิ่มหน่วยจึงอาจต้อง มี Home Sensor (Home Limit) เพื่อเริ่มต้นการวัดตำแหน่งสัมบูรณ์




