![]()
- Details
- Written by Super User
- Category: Robot
- Hits: 730


การเปรียบเทียบระหว่างเกียร์ฮาร์มอนิก (Harmonic Gear) กับเกียร์ชนิดอื่นๆ ในกลุ่มเดียวกัน หมายถึงการเปรียบเทียบกับเกียร์ที่ให้ความแม่นยำ และ อัตราทดสูงในการส่งกำลัง เช่น เกียร์แบบสปูร (Spur Gear), เกียร์เพลเนตารี (Planetary Gear), เกียร์วอร์ม (Worm Gear) และอื่นๆ ข้อดีและข้อเสียของแต่ละประเภทสามารถสรุปได้ดังนี้:
สำหรับท่านผู้ที่สนใจสามารถกดลิงค์เพื่อสั่งซื้อสินค้าของเราได้ตามลิงค์นี้
เกียร์ฮาร์มอนิก
ข้อดี:
- ความแม่นยำสูง: เนื่องจากการออกแบบที่ลดจุดสัมผัสฟันเกียร์ ทำให้มีความแม่นยำในการส่งกำลังสูงมาก
- อัตราทดสูง: สามารถให้อัตราทดที่สูงในขนาดที่เล็กกระทัดรัด
- ความสามารถในการรับแรงบิดสูง: แม้ว่าจะมีขนาดเล็กแต่สามารถรับแรงบิดได้สูง
- การสึกหรอต่ำ: มีการสึกหรอน้อยเนื่องจากมีจุดสัมผัสฟันเกียร์น้อย
ข้อเสีย:
- ราคาสูง: มีราคาสูงกว่าเกียร์ประเภทอื่นๆ เนื่องจากความซับซ้อนในการผลิต
- ความซับซ้อนในการติดตั้งและบำรุงรักษา: ต้องการความรู้เฉพาะทางและอุปกรณ์พิเศษ
- ความร้อนที่เกิดขึ้นระหว่างการทำงาน: อาจต้องมีระบบระบายความร้อนเพิ่มเติม
เกียร์สปูร
ข้อดี:
- ความเรียบง่ายและราคาถูก: มีการออกแบบที่เรียบง่าย ทำให้มีราคาไม่สูง
- การติดตั้งง่าย: สามารถติดตั้งและบำรุงรักษาได้ง่าย
- ความน่าเชื่อถือ: มีความน่าเชื่อถือสูงในการใช้งาน
ข้อเสีย:
- ความแม่นยำไม่สูงเท่าเกียร์ฮาร์มอนิก: เหมาะกับการใช้งานที่ไม่ต้องการความแม่นยำสูงมาก
- อัตราทดจำกัด: มีข้อจำกัดในการให้อัตราทดที่สูง
เกียร์เพลเนตารี
ข้อดี:
- อัตราทดสูง: สามารถให้อัตราทดที่สูงในขนาดที่ค่อนข้างเล็ก
- การกระจายแรงบิด: มีการกระจายแรงบิดได้ดี เพิ่มความน่าเชื่อถือ
- ความสามารถในการรับแรงบิดสูง: เหมาะสำหรับการใช้งานที่ต้องการแรงบิดสูง
ข้อเสีย:
- ความซับซ้อนในการออกแบบและผลิต: ทำให้มีราคาสูงกว่าเกียร์ชนิดอื่นๆ
- ความซับซ้อนในการบำรุงรักษา: ต้องการความเชี่ยวชาญในการบำรุงรักษา
เกียร์วอร์ม
ข้อดี:
- อัตราทดสูง: สามารถให้อัตราทดสูงในขนาดที่ค่อนข้างเล็ก
- การติดตั้งที่หลากหลาย: สามารถติดตั้งในหลายทิศทาง
- การล็อคตัวเอง: สามารถป้องกันการหมุนย้อนกลับได้
ข้อเสีย:
- การสูญเสียพลังงาน: มีการสูญเสียพลังงานจากแรงเสียดทานสูง
- ความร้อนที่เกิดขึ้น: อาจต้องการระบบระบายความร้อน
แต่ละประเภทของเกียร์มีข้อดีและข้อเสียที่แตกต่างกัน การเลือกใช้เกียร์จึงควรพิจารณาจากความต้องการของการใช้งาน ความจำเป็นในเรื่องของความแม่นยำ, อัตราทด, การรับแรงบิด, ค่าใช้จ่าย และความเรียบง่ายในการบำรุงรักษา
การเปรียบเทียบระหว่างเกียร์ฮาร์มอนิก (Harmonic Gear) กับเกียร์ไซคลอยด์ (Cycloidal Gear) เป็นการเปรียบเทียบระหว่างสองเทคโนโลยีในการส่งกำลังที่มีความแม่นยำและอัตราทดสูง ทั้งสองประเภทของเกียร์นี้มีข้อดีและข้อเสียที่แตกต่างกันและมีความเหมาะสมกับการใช้งานในแอปพลิเคชั่นที่แตกต่างกันเช่นกัน:
เกียร์ฮาร์มอนิก
ข้อดี:
- ความแม่นยำสูง: ให้ความแม่นยำในการส่งกำลังสูงมาก เหมาะกับการใช้งานที่ต้องการความแม่นยำและการตอบสนองที่ดี
- อัตราทดสูง: สามารถให้อัตราทดที่สูงในขนาดที่เล็กกระทัดรัด
- น้ำหนักเบาและขนาดเล็ก: เหมาะสำหรับการใช้งานในพื้นที่จำกัด
- การสึกหรอต่ำ: มีจุดสัมผัสฟันเกียร์น้อย ลดการสึกหรอ
ข้อเสีย:
- ราคาสูง: เนื่องจากความซับซ้อนในการผลิต
- ความร้อนในการทำงาน: อาจต้องการระบบระบายความร้อนเพิ่มเติม
- ความซับซ้อนในการติดตั้งและบำรุงรักษา
เกียร์ไซคลอยด์
ข้อดี:
- ความทนทาน: มีความทนทานต่อแรงกระแทกและการสึกหรอ ทำให้เหมาะกับการใช้งานในสภาพแวดล้อมที่หนักหน่วง
- ความสามารถในการรับแรงบิดสูง: สามารถรับแรงบิดได้สูงเนื่องจากมีพื้นที่สัมผัสฟันเกียร์มากกว่า
- การลดความเร็วและเพิ่มแรงบิดได้อย่างมีประสิทธิภาพ: มีอัตราทดที่สูงและการกระจายแรงบิดที่ดี
- ราคาต่ำกว่าเกียร์ฮาร์มอนิก: สามารถผลิตได้ในราคาที่ต่ำกว่า
ข้อเสีย:
- ขนาดและน้ำหนัก: อาจมีขนาดและน้ำหนักมากกว่าเกียร์ฮาร์มอนิกเมื่อเทียบกันที่อัตราทดเท่ากัน
- ความซับซ้อนในการผลิต: การออกแบบและผลิตเกียร์ไซคลอยด์อาจซับซ้อนกว่า
- ความแม่นยำ: แม้จะมีความแม่นยำในระดับสูง แต่อาจไม่เทียบเท่าเกียร์ฮาร์มอนิกในบางการใช้งาน
ในการเลือกใช้เกียร์ฮาร์มอนิกหรือเกียร์ไซคลอยด์ ควรพิจารณาจากความต้องการของแอปพลิเคชัน เช่น ความต้องการความแม่นยำ, ความทนทานต่อแรงกระแทก, การรับแรงบิด, ข้อจำกัดเรื่องพื้นที่, และงบประมาณ การเลือกใช้เกียร์ชนิดใดชนิดหนึ่งจึงควรอิงตามข้อกำหนดเหล่านี้เพื่อให้ได้ประสิทธิผลที่ดีที่สุดในการใช้งาน.
สำหรับท่านผู้ที่สนใจสามารถกดลิงค์เพื่อสั่งซื้อสินค้าของเราได้ตามลิงค์นี้
- Details
- Written by Super User
- Category: Robot
- Hits: 1510
วัตถุประสงค์ของบทความนี้
ในบทความนี้ เราจะควบคุม XY Robot โดยใช้บอร์ด ESP32 และ สมาร์ทโฟน ผ่าน Bluetooth " แบบง่าย ๆ เพื่อให้เข้าใจการควบคุมการเคลื่อนที่เบื้องต้น " เพื่อเรียนรู้การควบคุมขั้นสูงต่อไป
อุปกรณ์ที่จำเป็น
บอร์ด ESP32
บอร์ด CNC Shield
A4988 Motor Controller Module
Smartphone
lm2596 Dc-Dc Stepdown
Auto XY ท่านสามารถซื้อได้ตาม Link นี้
วงจร
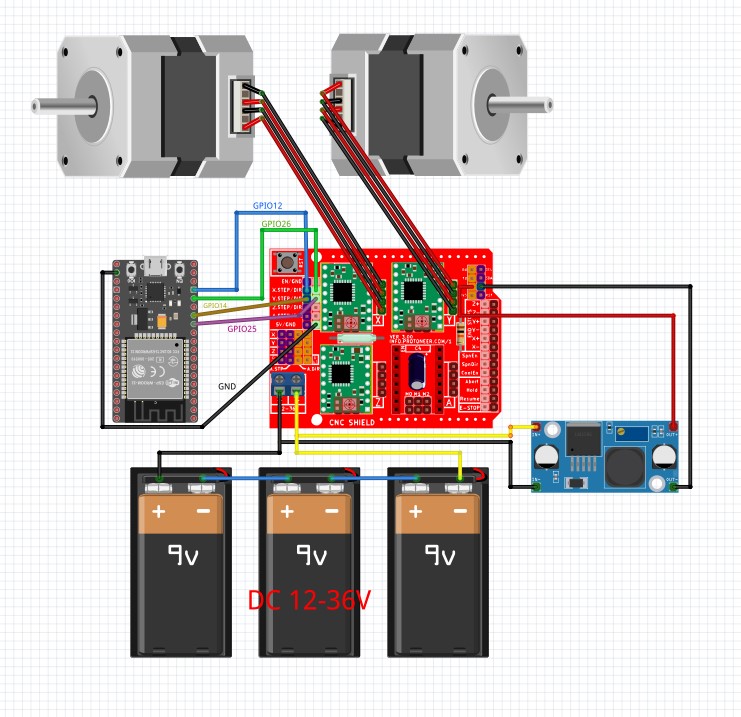
Microcontroller Program Code
ส่วนโปรแกรมที่ช่วยให้เชื่อมต่อบอร์ด ESP32 กับ สมาร์ทโฟนและรับข้อความที่มีคำสั่งของรถ โดยใช้ Arduino IDE
#include <BluetoothSerial.h>
BluetoothSerial SerialBT;
String state;
const int Pulse = 12;
const int Direction = 26;
const int Pulse2 = 14;
const int Direction2 = 25;
void setup() {
Serial.begin(115200);
SerialBT.begin("ESP32");
pinMode(Pulse, OUTPUT);
pinMode(Direction, OUTPUT);
pinMode(Pulse2, OUTPUT);
pinMode(Direction2, OUTPUT);
}
void loop() {
if (SerialBT.available()) {
state = SerialBT.readString();
}
Serial.println(state);
if (state == "left") {
digitalWrite(Pulse, HIGH);
digitalWrite(Direction, HIGH);
delayMicroseconds(1);
digitalWrite(Pulse, LOW);
delayMicroseconds(10);
} else if (state == "right") {
digitalWrite(Pulse, HIGH);
digitalWrite(Direction, LOW);
delayMicroseconds(1);
digitalWrite(Pulse, LOW);
delayMicroseconds(10);
} else if (state == "forward") {
digitalWrite(Pulse2, HIGH);
digitalWrite(Direction2, HIGH);
delayMicroseconds(1);
digitalWrite(Pulse2, LOW);
delayMicroseconds(10);
} else if (state == "backward") {
digitalWrite(Pulse2, HIGH);
digitalWrite(Direction2, LOW);
delayMicroseconds(1);
digitalWrite(Pulse2, LOW);
delayMicroseconds(10);
} else if (state == "stop") {
digitalWrite(Pulse, LOW);
digitalWrite(Direction, LOW);
digitalWrite(Pulse, LOW);
digitalWrite(Pulse2, LOW);
digitalWrite(Direction2, LOW);
digitalWrite(Pulse2, LOW);
}
}
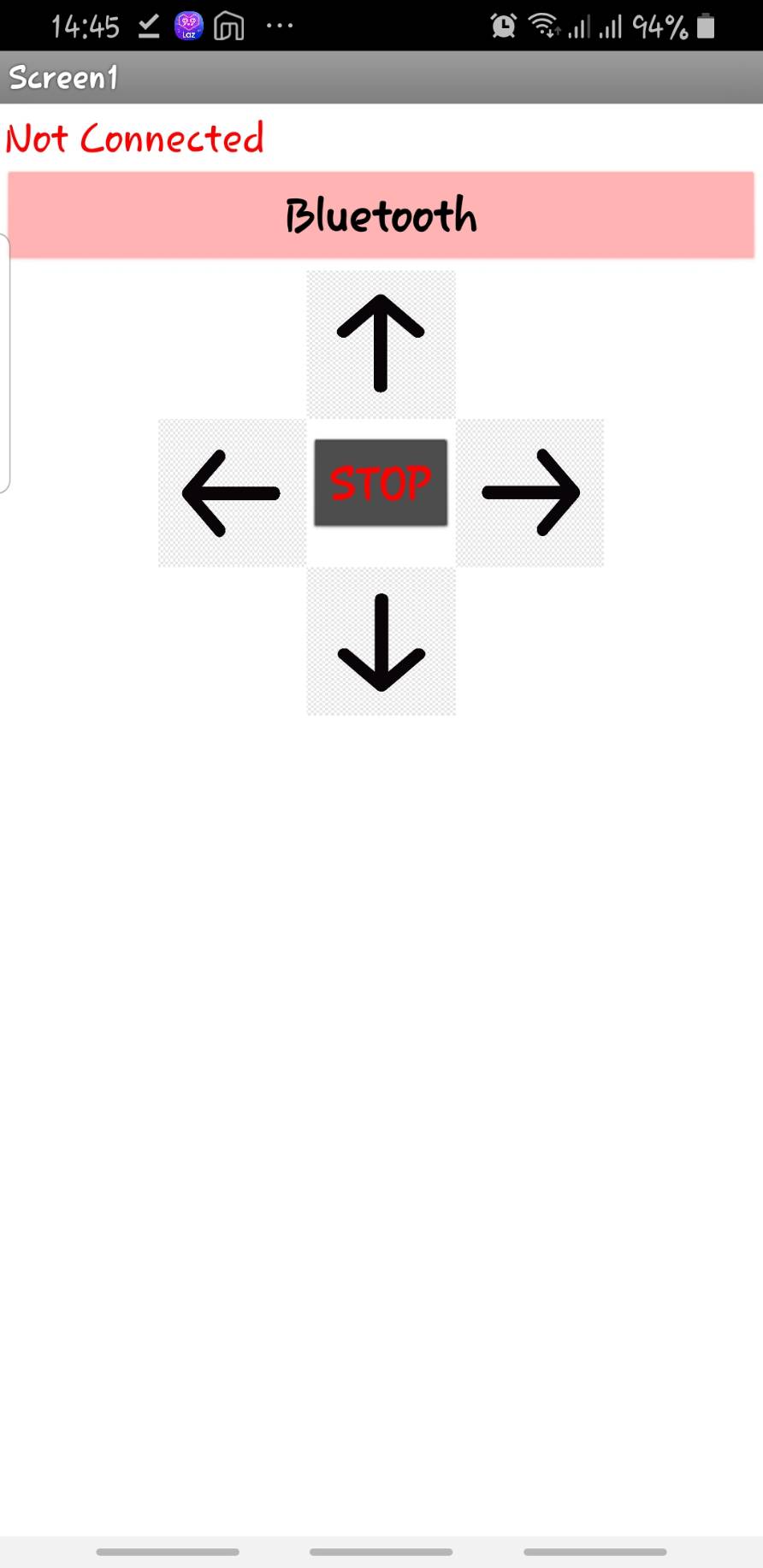
Application with App Inventor
เราจะสร้างแอปพลิเคชันมือถือด้วย App Inventor ซึ่งช่วยให้สามารถควบคุม Auto XY ด้วยสมาร์ทโฟนได้ เราออกแบบแอปพลิเคชันด้วยภาพต่อไปนี้ :
ภาพตัวอย่าง
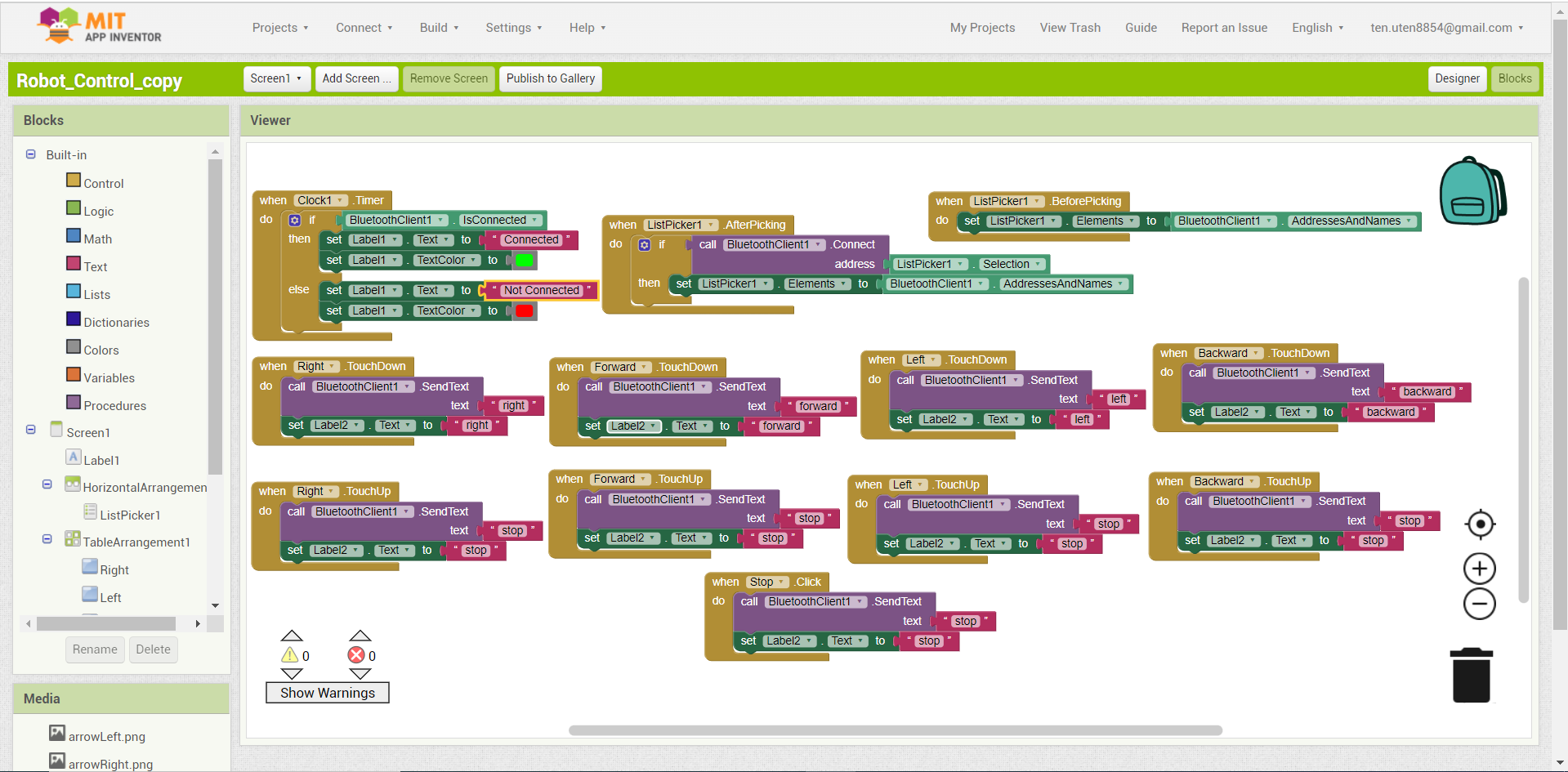
Programming with App Inventor
ในการเขียนโปรแกรมแอปพลิเคชัน App Inventor จะใช้ภาษา Blocks ซึ่งช่วยให้คุณสามารถสร้างโปรแกรมในรูปแบบของบล็อกไดอะแกรม ใช้งานง่ายมาก แต่ต้องใช้ตรรกะในการเขียนโปรแกรมเล็กน้อย
นี่คือโปรแกรมของแอปพลิเคชันที่สร้างขึ้นใน App Inventor (click บนรูปเพื่อดูขนาดจริง)
VDO
- Details
- Written by Super User
- Category: Robot
- Hits: 1394
เรื่องของ Robot ซึ่งเป็นความฝันที่ทุกคนอยากจะเป็น และอยากจะมีความรู้ อยากจะเล่นกับมันการควบคุมแขนกลหรือรูปแบบของโรบอทแบบอื่น แต่ไม่ทราบหรือไม่มีแนวทางว่าจะเริ่มต้นอย่างไร
Service Robot สำหรับการให้บริการช่วยเหลือขั้นพื้นฐาน ทางการแพทย์
ปัจจัยหลักๆที่ต้องทำ คือ จะต้องทำงานแทนคน หรือ ผู้ให้บริการทางการแพทย์ หรือ พยาบาล โดยที่ ควรจะเป็นระบบอัตโนมัติทั้งหมด ตั้งแต่ เริ่มต้นการทำงาน การแก้ไขปัญหาจนกระทั่งจบการทำงาน ยกตัวอย่างโจทย์ที่เราได้มาคือช่วงที่เกิดโควิด สำหรับโรงพยาบาลสนามสิ่งที่ลำบากและยากคือการบริการผู้ป่วยที่มีความเสี่ยงสูง Robot ก็ควรที่จะทำงานแทนบุคลากรทางการแพทย์ โดยที่ไม่ต้องมีการควบคุมจากมนุษย์ เพราะ การควบคุมจากมนุษย์มันจะต้องมีการฝึกฝนฝึกทักษะอีกมากมายหน้าที่ของ โรบอทเบื้องต้น คือ ทำงานประจำ เช่น ตรวจวัดค่าออกซิเจน วัดอุณหภูมิ และ ส่งรายงานผลไปยังเซิร์ฟเวอร์เพื่อประมวลผลหรือทำงานอื่นต่อไป และนี่คือ จุดเริ่มต้นของ Project นี้
เรื่องของ Robot ซึ่งเป็นความฝันที่ทุกคนอยากจะเป็น และอยากจะมีความรู้ อยากจะเล่นกับมันการควบคุมแขนกลหรือรูปแบบของโรบอทแบบอื่น แต่ไม่ทราบหรือไม่มีแนวทางว่าจะเริ่มต้นอย่างไร
- You are here:
-
Home

-
ข่าวสารและความรู้
- Robot




